Vivare research project successfully completed
Results from three years of development work on a varied reality
In spring 2017, Intenta GmbH started the joint research project "Vivare" with the professorship of process automation at Chemnitz University of Technology. The aim of the ERDF-funded research project was to make the safeguarding of driver assistance systems even more secure. This was achieved by the virtual expansion of real test drives by increasing the number of critical scenarios based on the data that had been entered. After three years of research and development work, the Intenta team looks at the results.
Further information on the general data of the project at: https://www.intenta.de/en/automotive/projects.html
Use of neural networks
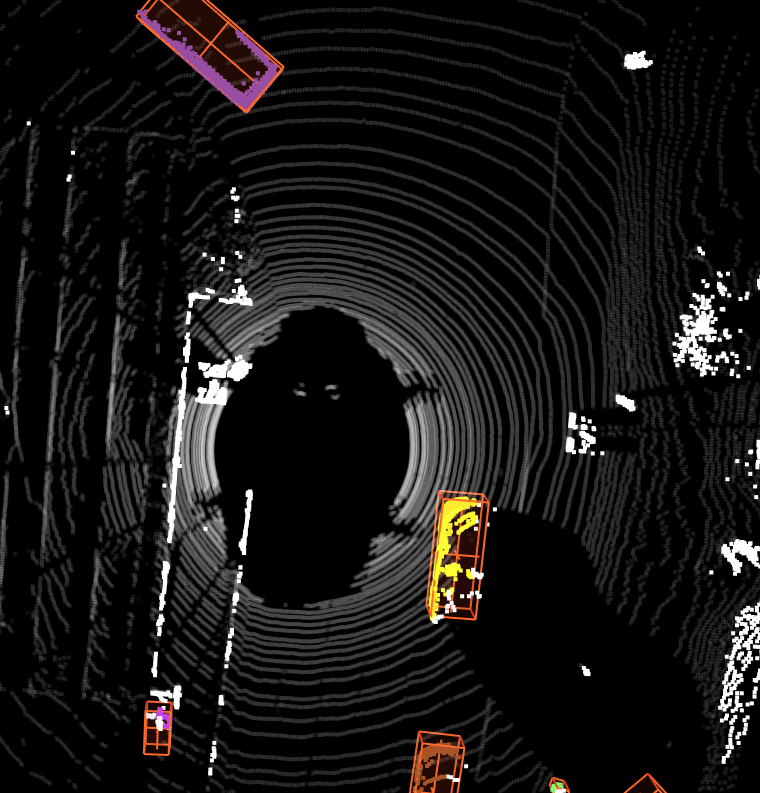
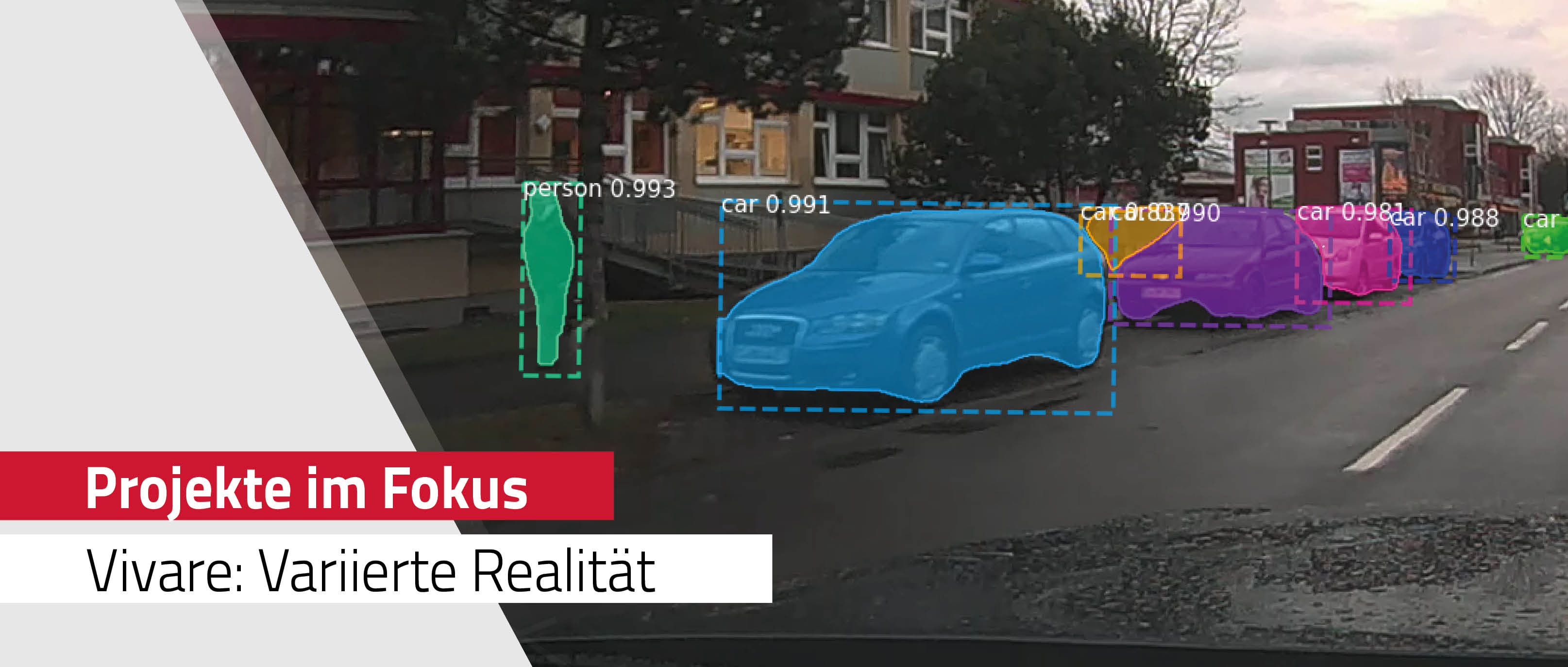
As part of the Vivare project, a neural network was trained that works directly on LiDAR point clouds and detects and tracks dynamic objects (road users). |
|
|
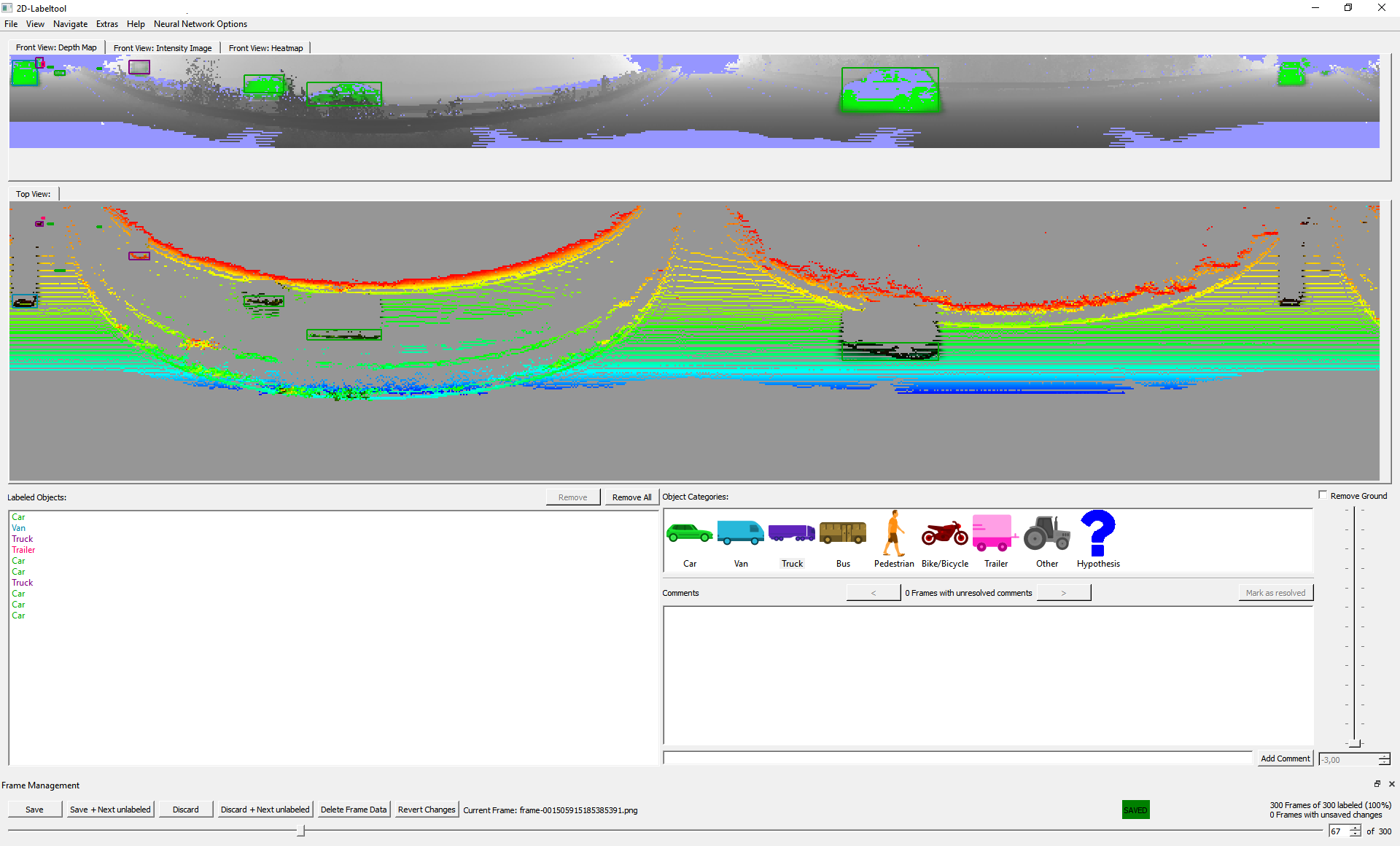
Development of a 2D label tool for LiDAR sensor data
A new 2D label tool was developed during the research to teach the AI. This makes it possible to assign road users and, to a certain extent, a location to the road users in LiDAR sensor data with a single click of the mouse. This is made possible by a neural network that is able to recognize road users within the point cloud by converting this 3D point cloud to a 360 ° depth image. |
|
|
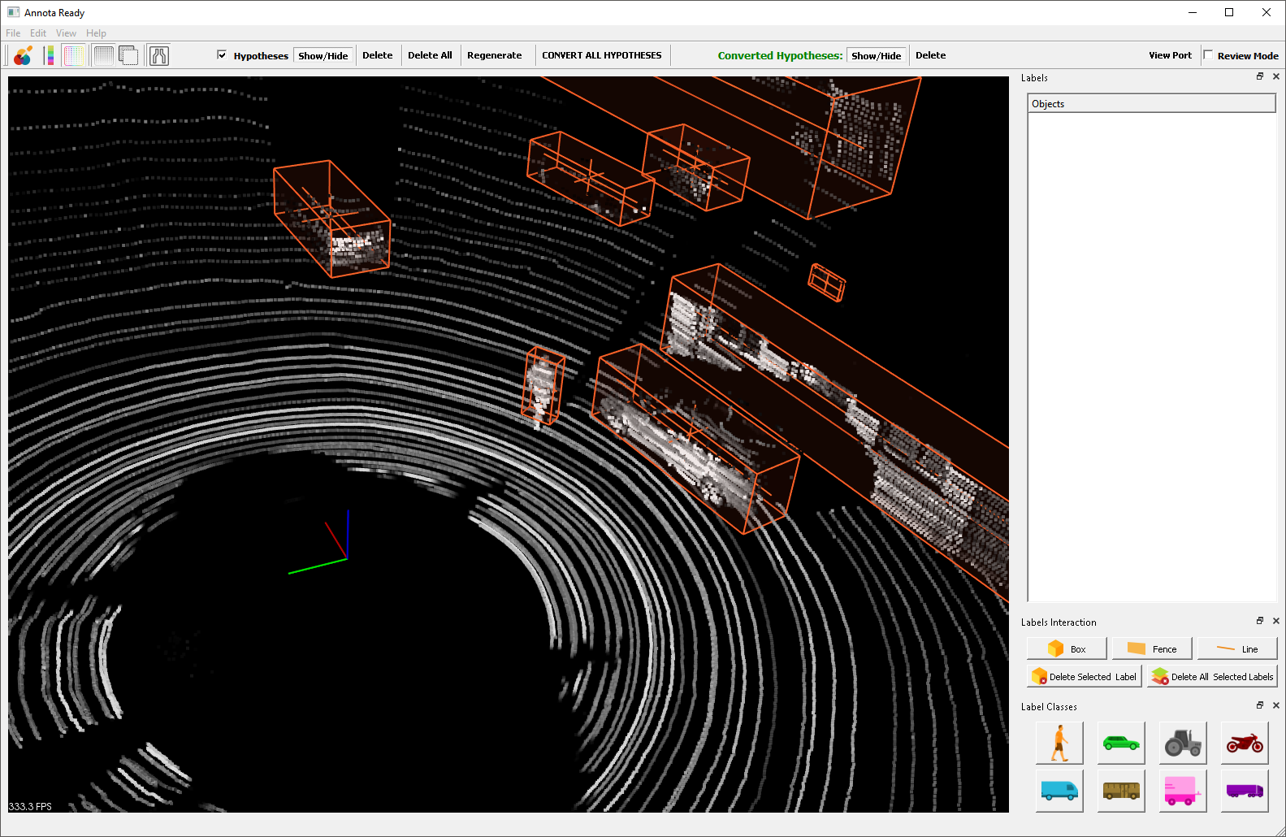
Development of a 3D label tool for efficient data processing
A 3D label tool was also developed for uncomplicated data processing in practice. The 3D labeling tool offers all the features that are necessary for fast 3D labeling. This includes various view modes, the display of hypotheses and their verification. This enables rapid labeling of 3D data.
|
|
|
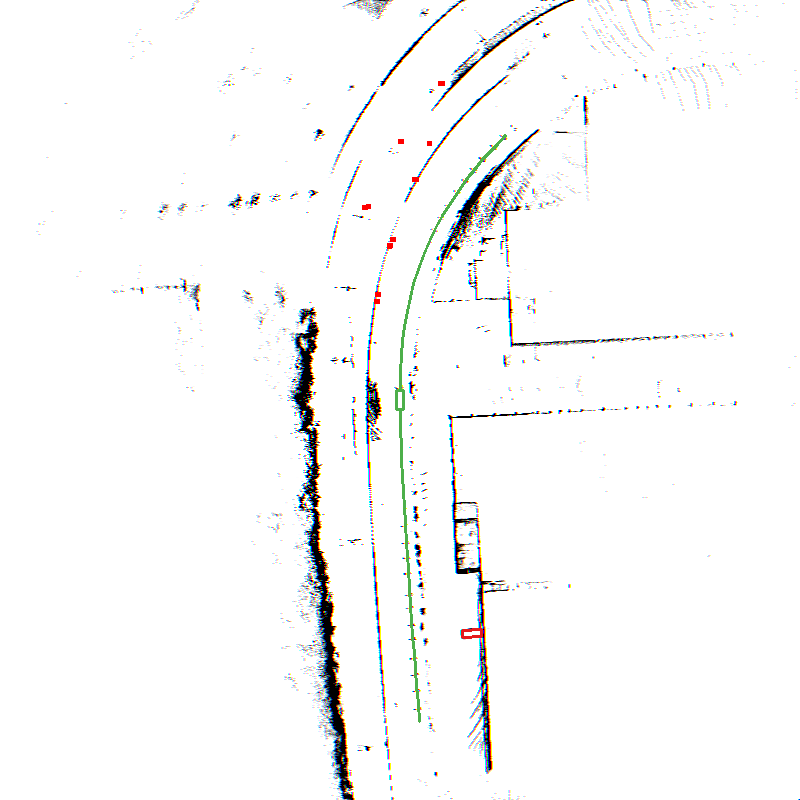
Generative sensor models
In order to generate additional relevant sensor data during data drives, it is possible to insert artificial vehicles into real data. As part of the Vivare project, a generative sensor model for the Long Range Radar (LRR) was created, which is able to generate realistic sensor data for such virtual vehicles.
|
|
|
Master thesis on the research project
|