Vivare Forschungsprojekt erfolgreich abgeschlossen
Ergebnisse aus drei Jahren Entwicklungsarbeit einer variierten Realität
Im Frühjahr 2017 startete die Intenta GmbH das gemeinsame Forschungsprojekt „Vivare“ mit der Professur Prozessautomatisierung der TU Chemnitz. Ziel des EFRE-geförderten Forschungsvorhabens war es, die Absicherung von Fahrerassistenzsystemen durch die virtuelle Erweiterung von realen Testfahrten noch sicherer zu machen, indem die Anzahl kritischer Szenarien anhand der eingefahrenen Daten erhöht wird. Nach drei Jahren Forschungs- und Entwicklungsarbeit blickt das Intenta-Team auf die Ergebnisse.
Weitere Infos zu den Rahmendaten des Projektes unter: https://www.intenta.de/de/automotive/beispielprojekte.html
Einsatz Neuronaler Netze
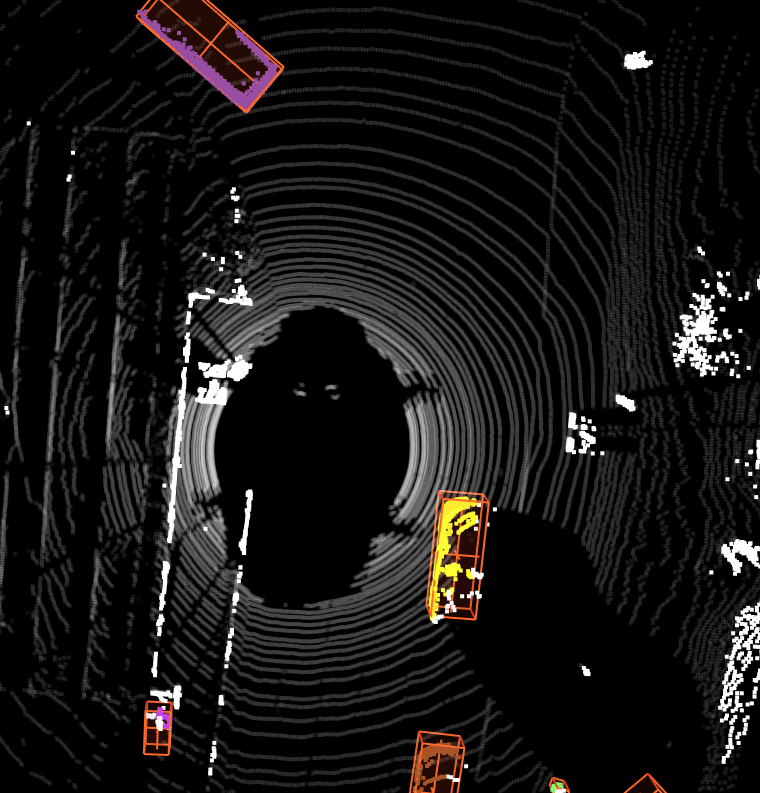
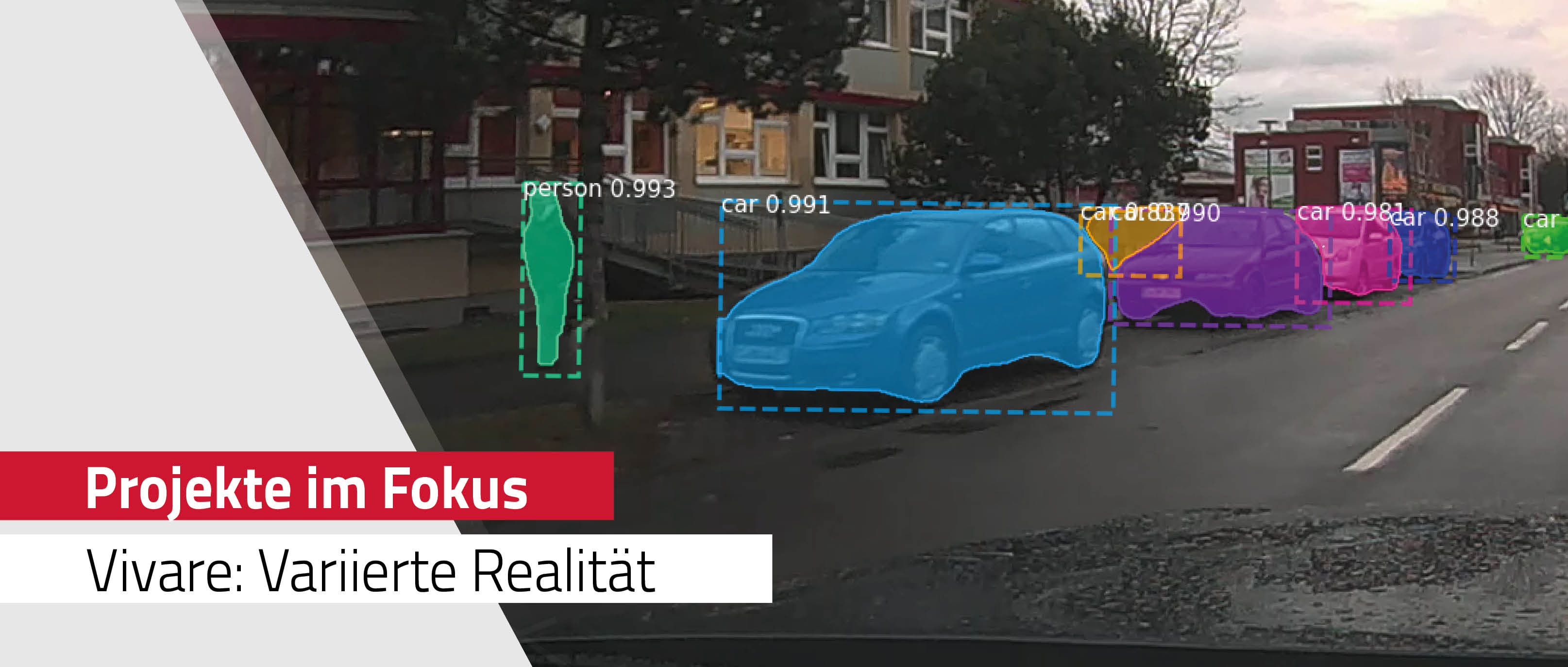
Im Rahmen des Vivare-Projekts wurde ein Neuronales Netz antrainiert, welches direkt auf LiDAR-Punktwolken arbeitet und darin dynamische Objekte (Verkehrsteilnehmer) detektiert und trackt. |
|
|
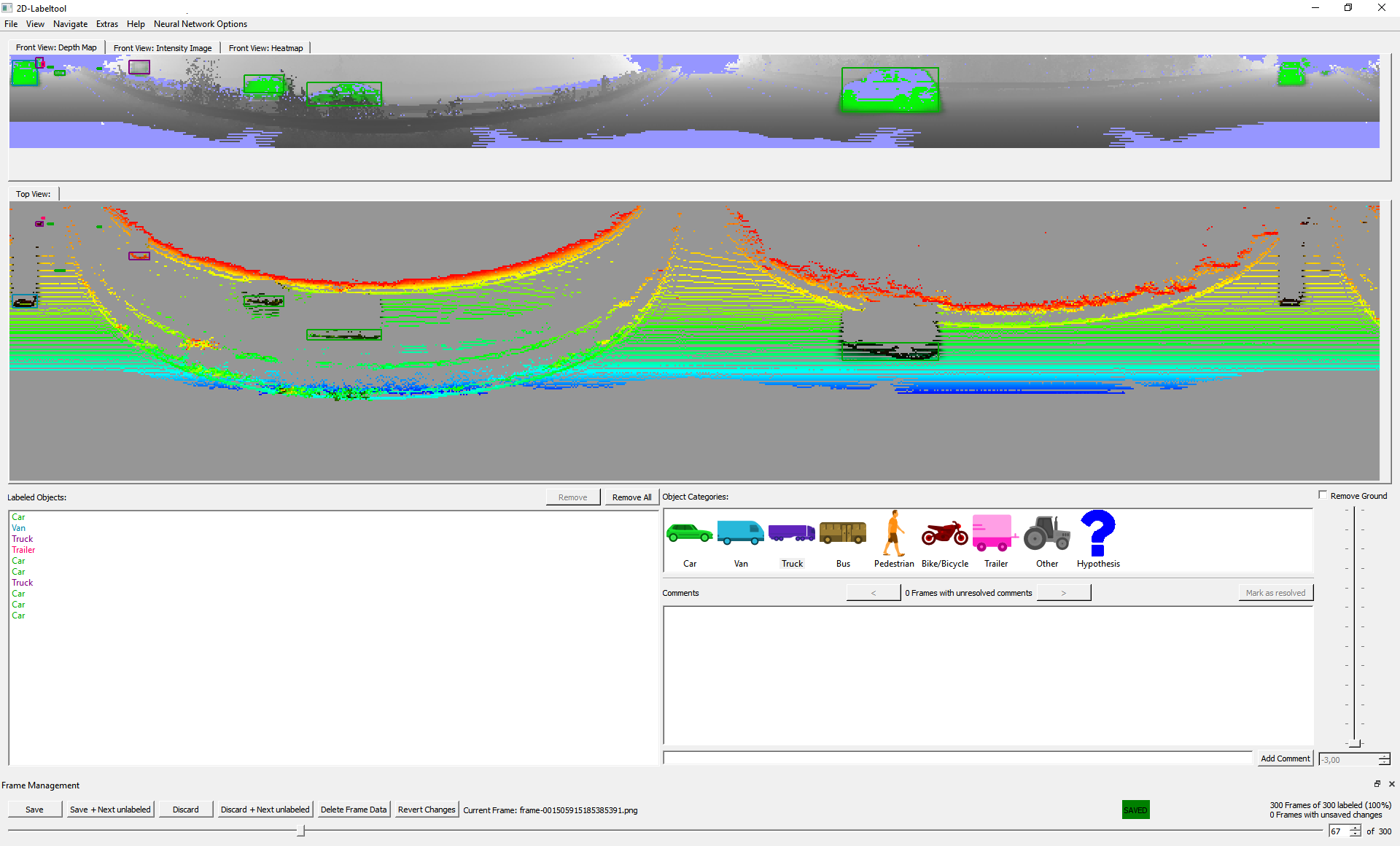
Entwicklung eines 2D-Labeltools für LiDAR Sensordaten
Zum Anlernen der KI wurde während der Forschungsarbeit ein neues 2D-Labeltool entwickelt. Damit ist es möglich, den Verkehrsteilnehmern in LiDAR Sensordaten mit einem einzigen Mausklick eine umschließende Boundingbox und damit gewissermaßen eine Verortung zuzuweisen. Dies wird durch ein Neuronales Netz ermöglicht, welches in der Lage ist, innerhalb der Punktwolke Verkehrsteilnehmer zu erkennen, indem diese 3D-Punktwolke auf ein 360°-Tiefenbild umgerechnet wird. |
|
|
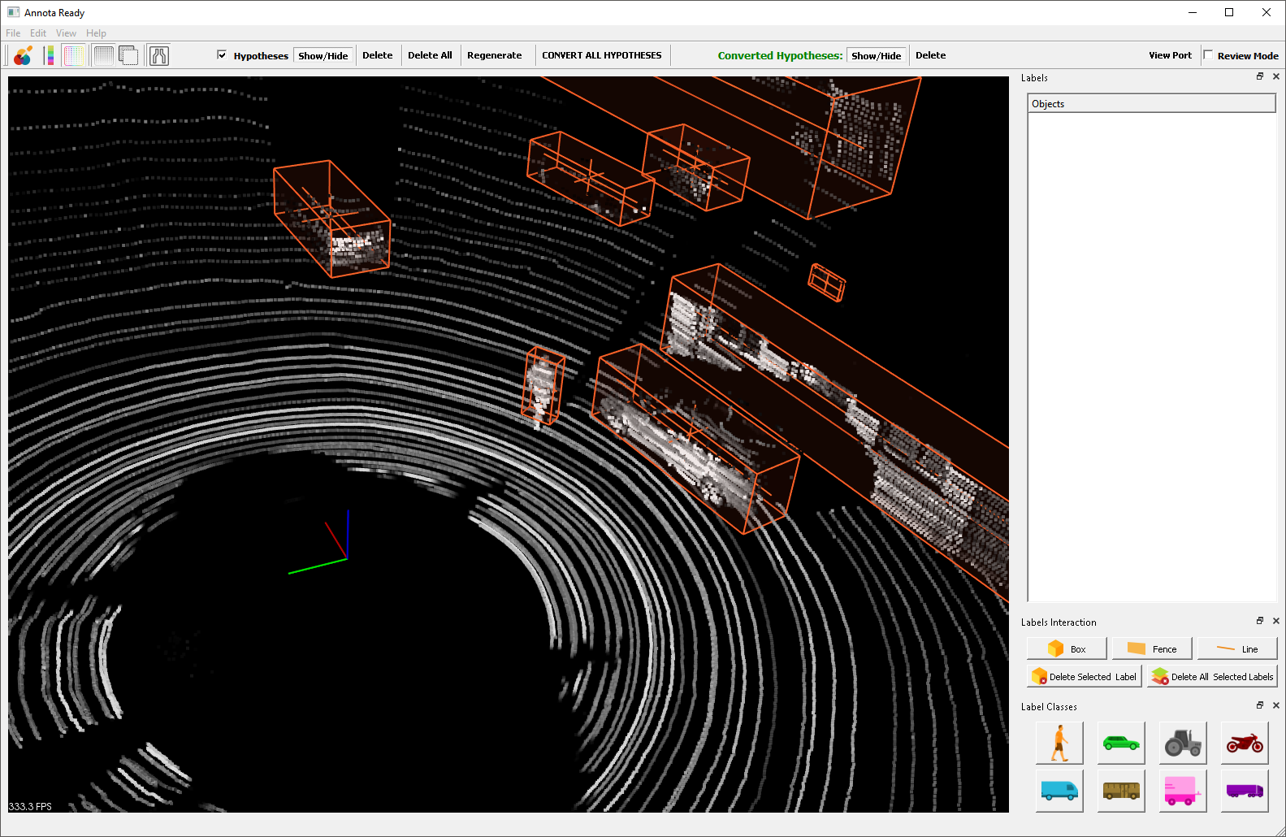
Entwicklung eines 3D-Labeltools für effiziente Datenverarbeitung
Für eine unkomplizierte Datenverarbeitung in der Praxis wurde zusätzlich ein 3D-Labeltool entwickelt. Das 3D-Labeltool bietet alle Features, die zum schnellen 3D Labeln nötig sind. Dazu zählen diverse Ansichtsmodi, die Anzeige von Hypothesen und deren Verifikation. Somit ist ein zügiges Labeln von 3D-Daten möglich.
|
|
|
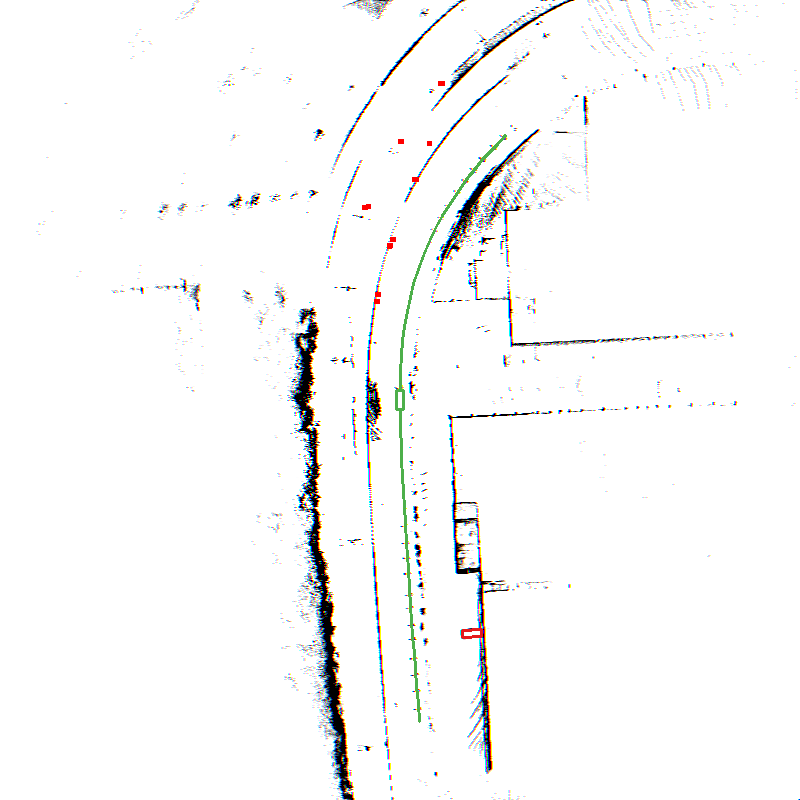
Generative Sensormodelle
Um innerhalb von Datenfahrten zusätzliche relevante Sensordaten zu erzeugen, ist es möglich, künstliche Fahrzeuge in echte Daten einzufügen. Im Rahmen des Vivare-Projekts wurde ein generatives Sensormodell für den Long Range Radar (LRR) erstellt, welches in der Lage ist, für solche virtuellen Fahrzeuge realistische Sensordaten zu erzeugen.
|
|
|
Masterarbeit zum Forschungsprojekt
|